News
計測自動制御学会 第13回 制御部門マルチシンポジウムで研究発表を行いました
2026年3月3日〜6日に富山国際会議場で開催された、計測自動制御学会 第13回 制御部門マルチシンポジウムで、以下の研究発表を行いました。
- 高尾勇輝, 西山和孝, 月崎竜童, 田畑邦佳, 堀田英之, 八田良樹, 鳥海森, 多重地球スイングバイと高比推力イオンエンジンを用いた高傾斜角太陽周回軌道への最適遷移, 計測自動制御学会 第13回 制御部門マルチシンポジウム, 3A3-1, 富山, 2026年3月.
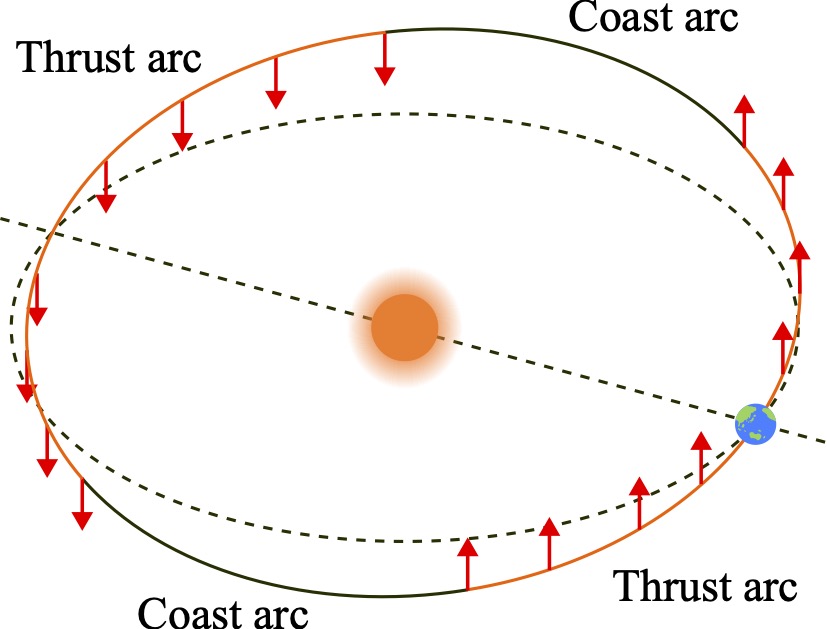
本発表は、2026/02/16のニュースでも紹介した、黄道面脱出および太陽多点観測に向けた軌道設計法について報告したものです。JAXAで開発中の高比推力イオンエンジン「μ10HIsp」を活用し、地球の重力を活用して軌道を操作する「スイングバイ」を繰り返し用いることで、黄道面に対する軌道傾斜角を効率的に変更する方法を提案しました。多数のスイングバイを経由する多周回の低推力軌道を設計するためには、極めて大規模な最適化問題を解く必要があります。この課題を解決するために、機械学習によるサロゲートモデルを用いて複雑な軌道計算プロセスを代替する方法を新たに開発し、実現性が見込まれる軌道の成立解を示しました。本研究は、高尾准教授が研究分担者として参画する、科学研究費助成事業 挑戦的研究(萌芽)の支援を受けたものです。
2026/03/06